一、状态机概要
在 有穷自动机 一文中从理论角度给出了状态机(或做自动机)的定义,本文从编码的角度来进一步阐述状态机的原理;状态机的实现无非是三个要素:状态、事件、行为 。用更直白的话来说就是:
- 当前系统处于什么状态?
- 当前发生了什么事?
- 在这样的状态下发生了这样的事,系统要怎么应对?
一句话描述状态机就是:某个对象在当前状态下,接收到某个事件执行某个动作,将对象的状态切换为下一个状态;当然在理论中对于状态机的定义有一个 转移函数 的概念,用于描述了在给定输入条件下从一个状态到另一个状态的转移过程,这个概念在实际编码过程中已隐含在其中了
二、状态机实现方式
现在我们使用C语言定义一些状态用来模拟一次网络请求,如下所示:
typedef enum
{
STATE_init,
STATE_connect,
STATE_query,
STATE_finish
} FSMState;
|
2.1 switch-case方式
这种方式可以说是最常见的方式,其实现形式也比较简单:
int main(){
FSMState fsmState;
while (fsmState != STATE_finish)
{
switch (fsmState)
{
case STATE_init:
handleStateInit();
break;
case STATE_connect:
handleStateConnect();
break;
case STATE_query:
handleStateQuery();
break;
case STATE_finish:
handleStateFinish();
break;
}
}
}
|
这里其实是有一些疑问的,对比上面所说的状态机的三个要素:状态、事件、行为,能清晰分辨出来第一个要素 状态 就是 fsmState ,行为 就是对应的处理函数,那么 事件 呢?是什么?首先要明白的是 状态机状态的跃迁都是受事件驱动的 ,所以在处理函数中一定隐含着 事件。 现在试着拆解一下在这个过程中的 事件 :
typedef enum {
EVENT_start,
EVENT_connect_success,
EVENT_connect_error,
EVENT_query_success,
EVENT_query_error
}Event;
|
将上面的switch-case结构的状态机展开,得到如下形式:
int main(){
FSMState fsmState;
Event event;
while (fsmState != STATE_finish)
{
switch (fsmState)
{
case STATE_init:
switch (event)
{
case EVENT_start:
doActionForStart();
fsmState = STATE_connect;
break;
default:
doActionNULL();
break;
}
break;
case STATE_connect:
switch (event)
{
case EVENT_connect_success:
doActionForConnectSuccess();
fsmState = STATE_query;
break;
case EVENT_connect_error:
doActionForConnectError();
fsmState = STATE_finish;
break;
default:
doActionNULL();
break;
}
break;
case STATE_query:
......
break;
case STATE_finish:
......
break;
}
}
}
|
当然并不是任何一个状态都要处理事件,因此上面有很多的 doActionNULL() ,在实际开发中这些是可以省略。
2.2 表驱动方式
在 2.1 所展示的方式中,可以看出当随着状态和事件越来越多,整个状态机的长度会非常的长,不利于维护,此时可以考虑采用表格驱动的方式:
定义状态表:
typedef struct
{
Event event;
FSMState curState;
void (*trans_action)(Event *event, void *params);
FSMState nextState;
}FSMTable;
|
要注意的是表格驱动方式比较迷惑的地方在于,跳转状态是事先确定的,这看起来似乎转移函数执行成功与否,系统都将按着既定的状态走,其实不然,表格驱动方式由两个元素来控制流程,第一个是状态,第二个是事件,关键就在于响应函数中去控制事件的跃迁
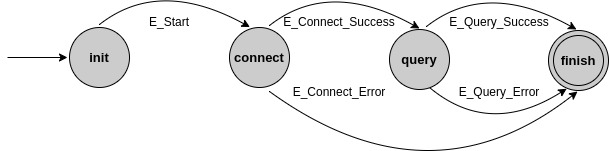
表驱动的方式,其实就是维护一张状态表,为了精确的描绘出状态与事件以及转移函数的关系,同时为了避免无意义的状态和事件处理,首先要做的是绘制出系统的状态图:
状态图中每一条线就是驱动表中的一条数据,由此可以得出:
FSMTable fsmtb[] = {
{ EVENT_start, STATE_init, handleInitForStart, STATE_connect },
{ EVENT_connect_success, STATE_connect, handleConnectForSuccess, STATE_query },
{ EVENT_query_success, STATE_query, handleQueryForSuccess, STATE_finish },
{ EVENT_connect_error, STATE_connect, handleConnectForError, STATE_finish },
{ EVENT_connect_error, STATE_query, handleQueryForError, STATE_finish }
};
|
注意响应函数的写法:
void handleInitForStart(Event *event, void *params){
int result = connect(ip,port);
if(result){
*event = EVENT_connect_success;
} else {
*event = EVENT_connect_error;
}
}
void handleConnectForSuccess(Event *event, void *params){
int result = query(ip,port);
if(result){
*event = EVENT_query_success;
} else {
*event = EVENT_query_error;
}
}
void handleQueryForSuccess(Event *event, void *params){
*event = EVENT_finish;
}
void handleConnectForError(Event *event, void *params){
*event = EVENT_finish;
}
void handleQueryForError(Event *event, void *params){
*event = EVENT_finish;
}
|
示例中的响应函数是直接更新触发事件,在实际中可根据传入的参数或外部条件来更新触发事件
至此完成了状态机的所有前置条件,接下来就是实现状态机了,我们定义状态机的结构:
typedef struct
{
FSMTable *fsmtb;
FSMState cur_sta;
Event event;
int sta_max_n;
}FSM;
|
执行状态机:
int run_fsm_action(FSM* fsm, void *args)
{
int max_n = fsm->sta_max_n, i=0;
FSMState cur_sta = fsm->cur_sta;
FSMTable *fsmtb = fsm->fsmtb;
if(!fsm) return -1;
for(i=0; i<max_n; ++i){
if(fsmtb[i].curState == cur_sta && fsmtb[i].event == fsm->event){
fsmtb[i].event_action(&fsm->event, args);
fsm->cur_sta = fsmtb[i].nextState;
break;
}
}
return 0;
}
int main()
{
FSM fsm = {0};
fsm.fsmtb = fsmtb;
fsm.cur_sta = STATE_init;
fsm.event=EVENT_start;
fsm.sta_max_n = sizeof(fsmtb)/sizeof(fsmtb[0]);
run_fsm_action(&fsm,NULL);
return 0;
}
|
2.3 函数指针方式
函数指针方式在形式和理解方面是比较容易的:用枚举变量表示状态与事件,用函数指针数组表述行为,用函数返回值表示下一个状态。使用函数指针的表现形式也是比较容易的,只是要注意整个FSM的初始化,以及在状态和事件非法时的处理逻辑,枚举变量的值一定从0开始,并且每次递增加1,否则容易引发堆栈问题。这种函数指针实现方式效率要比比swich-case高一些。
先来定义一下函数指针数组:
typedef FSMState (*FSM_DO_EVENT)(Event* event,void *params);
FSM_DO_EVENT fsmAction[STATE_finish][EVENT_stop];
void initFSMTable(){
FSMState state;
Event event;
for (state = STATE_init; state < STATE_finish; state++)
{
for (event = EVENT_start; event < EVENT_stop; event++)
{
fsmAction[state][event] = handle_do_null;
}
}
fsmAction[STATE_init][EVENT_start] = handleInitForStart;
fsmAction[STATE_connect][EVENT_connect_success] = handleConnectForSuccess;
fsmAction[STATE_query][EVENT_query_success] = handleQueryForSuccess;
fsmAction[STATE_connect][EVENT_connect_error] = handleConnectForError;
fsmAction[STATE_query][EVENT_connect_error] = handleQueryForError;
}
|
用法如下所示:
int main()
{
initFSMTable();
FSMState state = STATE_init;
Event event = EVENT_start;
while (1) {
FSMState nextState = fsmAction[state][event](event,NULL);
if (nextState == STATE_finish) {
printf("请求结束。\n");
break;
}
state = nextState;
}
return 0;
}
|
三、分层状态机
在实际工程中当业务逻辑十分复杂,状态很多的时候,这将导致状态机代码量十分庞大,不利于维护,这就需要考虑将这些复杂的状态分成不同的模块,其特点是这些模块具有高内聚的特性,尽可能的不受其他模块的影响,而在外部由一个大的状态机去管理,这些不同的模块则由若干个子状态机管理。这就是本章节所说的 分层状态机(Hierarchical Finite State Machine,HFSM) 。概括的说,分层有限状态机是一种模型,用于描述复杂的状态转换系统。它通过将复杂的状态图分成多个子状态机,从而使得状态转换的处理更加清晰、可控。
首先将上面 2.1 章节的例子改造一下,实际工作中,系统的初始化、网络连接状态查询、状态更新等操作都可能经过一些列的操作之后才能完成,比如我们假定初始化时需要连接串口设备,给设备发送不同的指令来校验,通过之后认为初始化成功,在原来的方式中,我们需要给 FSMState 中添加一些状态:
typedef enum
{
STATE_init,
STATE_check_key,
STATE_check_auth,
STATE_init_device,
STATE_connect,
STATE_query,
STATE_finish
} FSMState;
|
这样我们就不得不在原有的状态机系统上添加这些状态和响应事件:
int main(){
FSMState fsmState;
while (fsmState != STATE_finish)
{
switch (fsmState)
{
case STATE_init:
handleStateInit();
break;
case STATE_check_key:
handleStateCheckKey();
break;
case STATE_check_auth:
handleStateCheckAuth();
break;
case STATE_init_device:
handleStateCheckDevice();
break;
case STATE_connect:
handleStateConnect();
break;
case STATE_query:
handleStateQuery();
break;
case STATE_finish:
handleStateFinish();
break;
}
}
}
|
这样随着状态越来越多,代码会越来越长,而且会越来越复杂,所以需要一种更优雅的方式来处理状态机。注意到初始化模块功能比较内聚,可以提取出来使用一个子状态机管理:
typedef enum
{
STATE_start,
STATE_check_key,
STATE_check_auth,
STATE_init_device,
STATE_finish
} SubFSMInitState;
|
状态机运行系统可以改造为:
typedef enum
{
SUB_FSM_RETURN_ERROR,
SUB_FSM_RETURN_SUCCESS
}SubFSMReturn
SubFSMReturn handleStateInit(){
SubFSMInitState subState = STATE_start;
SubFSMReturn ret = SUB_FSM_RETURN_ERROR;
while(subState != STATE_finish){
switch (subState){
case STATE_start:
...
break;
case STATE_check_key:
...
break;
case STATE_check_auth:
...
break;
case STATE_init_device:
...
break;
case STATE_finish:
...
break;
}
}
return ret;
}
int main(){
FSMState fsmState;
while (fsmState != STATE_finish)
{
switch (fsmState)
{
case STATE_init:
SubFSMReturn ret = handleStateInit();
if(ret == SUB_FSM_RETURN_SUCCESS){
fsmState = STATE_connect;
} else {
fsmState = STATE_finish;
}
break;
case STATE_connect:
handleStateConnect();
break;
case STATE_query:
handleStateQuery();
break;
case STATE_finish:
handleStateFinish();
break;
}
}
}
|
四、事件队列与状态机
介绍到现在,是不是可以认为这已经足够应对所有的场景了?其实不然,在多线程场景下,对系统有不同的任务要求,但是状态机更多的是遵循一个固定的状态流转,无法满足异步任务的场景,那么应该如何解决呢? 虽然任务是异步的,但当这些异步任务是按着先后顺序执行的时候,对于状态机来说就可以满足要求,先看如下一个示意图:
这里我将用户的操作抽象成不同的业务,而不同的业务是由一系列的模块组成的。这些模块例如:秘钥、Mqtt、Login、DS等具有高内聚的特性,控制线程 ControlThread 内部维持一个线程安全的队列,用户的操作被分解为不同的模块,这些模块被当做事件插入到队列当中,ControlThread 线程不断从队列中取出事件,这些事件内部又有各自的子状态机去处理,在控制线程中根据这些子状态机的返回状态来决定是否继续执行。
这样在面对不同的业务时,只需要将对应的事件插入队列当中然后等待执行即可。